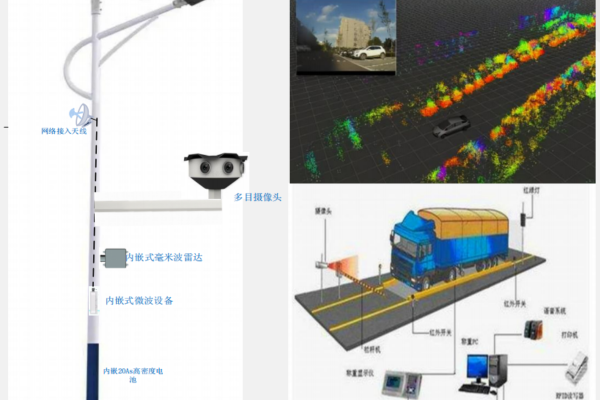
องค์ประกอบหลักของระบบ:
- ระบบภาพถ่าย AI หลายวัตถุประสงค์, การวิเคราะห์และการระบุยานพาหนะในสภาพแวดล้อมแสง
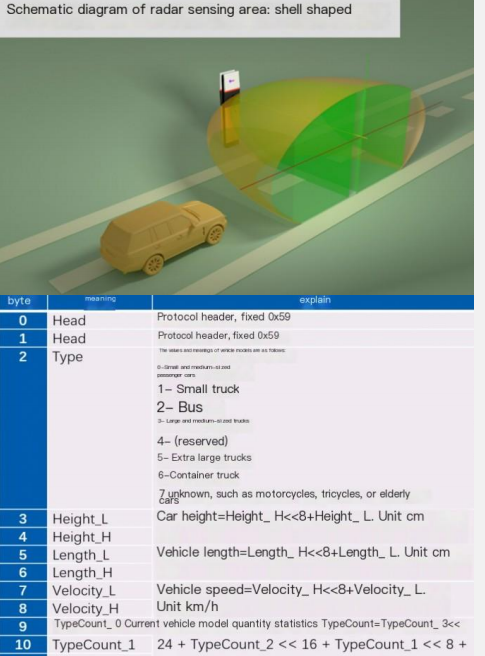
- ระบบสร้างภาพ 4D เรดาร์คลื่นมม., การจำแนกประเภทยานพาหนะในสภาพแวดล้อมทั้งหมด
- ระบบส่งข้อมูลไมโครเวฟแบนด์กว้างระยะไกลพิเศษสำหรับการส่งข้อมูลการตรวจสอบอุปกรณ์ระยะไกล
- ระบบจ่ายไฟ, แหล่งจ่ายไฟแบบผสมผสาน, การเก็บพลังงานจากแบตเตอรี่ความจุสูงทนต่ออุณหภูมิต่ำ
- แท่งไฟอัจฉริยะแบบบูรณาการ สามารถติดตั้งได้ในตัว แบตเตอรี่ อุปกรณ์ไมโครเวฟ เรดาร์คลื่นมิลลิเมตร และอุปกรณ์อื่น ๆ เพื่อปรับปรุงความปลอดภัยของอุปกรณ์
เหมืองอัจฉริยะ — เงื่อนไขจำนวน Ferlike ของ Polida
ในปัจจุบัน การตรวจจับด้วยวิดีโอ คลื่นอัลตราโซนิก และการรู้จำด้วย线圈เหนี่ยวนำ มักถูกใช้สำหรับการจำแนกรูปแบบ อย่างไรก็ตาม การตรวจจับภาพวิดีโอมีข้อกำหนดที่สูงเกี่ยวกับคุณภาพและสภาพแวดล้อมของภาพ ซึ่งทำให้ยากต่อการตรวจจับรูปแบบได้อย่างแม่นยำเมื่อมีการรบกวนและความมืด เช่นฝนและหิมะ นอกจากนี้ การตรวจจับด้วยคลื่นอัลตราโซนิกสามารถสกัดข้อมูลโครงร่างของยานพาหนะเพื่อทำการจำแนกประเภทได้ง่าย แต่มีความแม่นยำต่ำ และการติดตั้งอุปกรณ์อาจซับซ้อนมาก ดังนั้น การทำให้การจำแนกประเภทเป็นเรื่องง่ายและแม่นยำจึงมีความสำคัญอย่างยิ่ง โดยผ่านการสร้างภาพด้วยเทคโนโลยีเรดาร์มิลลิเมตรจึงกลายเป็นทางออกที่ดีที่สุด คุณลักษณะทางเทคนิคและการได้เปรียบของมันมีดังนี้
- เหนือกว่าสภาพอากาศ สามารถรู้จำจำนวนรุ่นยานพาหนะในสภาพแวดล้อมแสงโดยไม่มีแสง
- ข้อกำหนดของสิ่งแวดล้อมต่ำ ไม่กลัวฝุ่น ฝน หมอก และผลกระทบจากสภาพแวดล้อมอื่นๆ ไม่จำเป็นต้องทำความสะอาดหน้าต่างการรับรู้เป็นประจำ อัตราการเสื่อมสภาพต่ำลง
- ขนาดเล็กและใช้พลังงานต่ำ; ขนาดเล็กกว่าและใช้พลังงานน้อยกว่า สะดวกต่อการติดตั้งและการซ่อนในงานวิศวกรรม
- ใช้เพื่อนับจำนวนยานพาหนะที่ผ่านไป และสามารถแยกแยะรถยนต์ได้ง่ายผ่านคลื่นสะท้อนเรดาร์
- สามารถทำงานร่วมกับวิธีอื่นๆ เช่น กล้องแสง จีโอแมกเนติก เช่น การรู้จำยานพาหนะด้วยจีโอแมกเนติกและการนับยานพาหนะ เพื่อเพิ่มความน่าเชื่อถือของระบบ
- การตรวจจับและความเป็นส่วนตัว ไม่สแกนหรือบันทึกคนขับและบุคคลทั่วไป แต่บันทึกและสแกนเฉพาะสถานการณ์ของยานพาหนะ