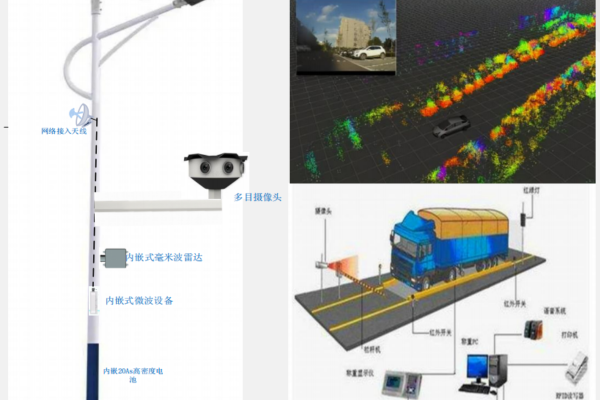
システムの主要構成:
- 多目的AI視覚画像システム,光環境での車両分析と識別
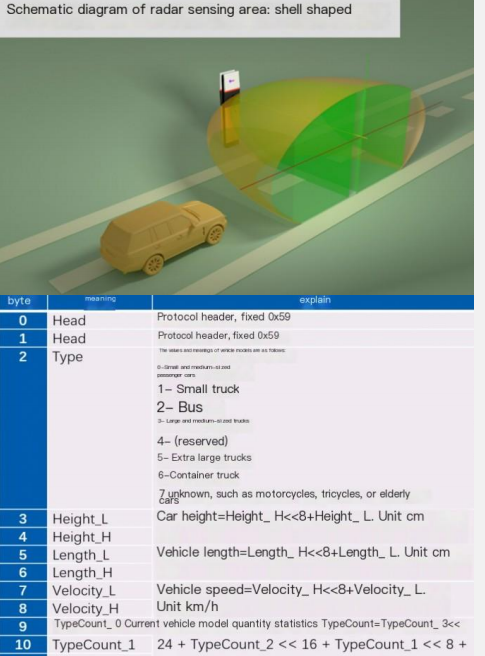
- ミリメートル波レーダー 4D画像システム,環境全体で車両タイプ認識
- 特殊ネットワーク 遠隔大帯域データ伝送システム 遠隔監視機器 監視データアップロード
- 電力供給システム,包括的な補給電力供給,大容量低温バッテリーエネルギー貯蔵
- 組み込みのスマートライト棒,内蔵缶 バッテリー 電子レンジ装置,ミリ波レーダー,機器の安全性を向上させる他の装置
機械の技術 機械の技術 機械の技術 機械の技術
現在,ビデオ画像検出,超音波検出,インダクションコイル認識は,通常モデル認識に使用されています. しかし,ビデオ画像検出は,画像の品質と環境に対する要求が高く,雨や雪などの干渉と薄光の場合,正確なモデル検出を達成することは困難です. 強い,小さな環境に影響を受けますが,複雑な保守,高い保守コスト,地面
- 照明のない環境でも,車両のモデルの数が認識できます.
- 環境要求は低く,塵,雨,水霧などの環境影響の恐れなく,インダクション窓を定期的に清掃する必要はありません.
- 容量が小さく,電力消費量が少ない. 容量が小さく,電力消費量が少ない. 簡単に設置し,エンジニアリングアプリケーションで隠すことができます.
- 車両の数を通して車両の数を数え,レーダー反射波を通して車を区別することは簡単です
- システム信頼性を向上させるため,光カメラ,地磁気,地磁気車両認識,車両統計などの他の手段と協力できます.
- 運転手やスタッフのスキャンや記録ではなく,車両の状況を記録しスキャンするだけです