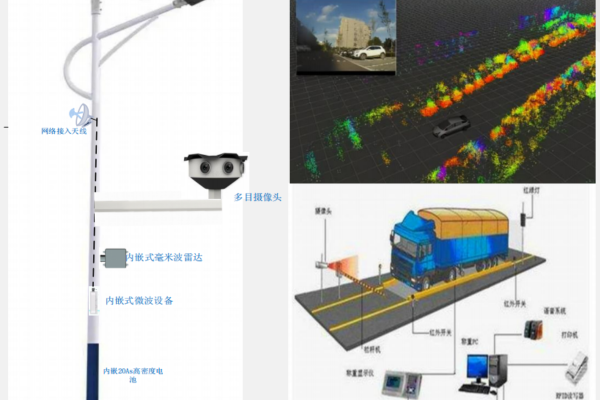
הרכב העיקרי עיקר של המערכת:
- מערכת צילום חזותי חכם רב - תכליתי, ניתוח וזיהוי רכב בתנאי תאורה
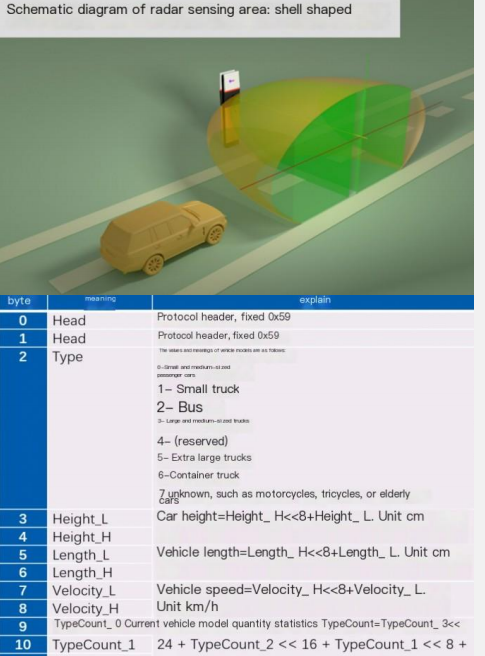
- מערכת צילום 4D ברדאר מילימטרי, זיהוי סוג רכב בכל הסביבה
- מערכת שידור מיקרוגל של נתונים מרוחקים עם רוחב פס גדול עבור רשת מיוחדת, העלאה של נתוני ציוד מוניטורינג מרוחק
- מערכתספק חשמל, ספק חשמל משלים כולל, אחסון אנרגיה של בטריות קיבוליות גדולות בטמפרטורות נמוכות
- מוטות אור חכמים משולבים, יכולים להיות מובנים סוללות , ציוד מיקרוגל, מכ"ם גל מילימטרי ומכשירים אחרים כדי לשפר את בטיחות הציוד
מינה חכמה — תנאים מיוחדים של מספר פולידה
בזמננו, используется בדרך כלל זיהוי דגם באמצעות תצפית בתמונה וידאו, תצפית אולטרסונית והכרה במעגלים אינדוקטיביים. עם זאת, לתצפית בתמונה וידאו יש דרישות גבוהות יותר איכות התמונה והסביבה, מה שגורם לקושי בהישג זיהוי מדויק של הדגם במקרה של הפרעה או תאורה גרועה כמו גשם ושלג. חזק, מעט מושפע מהסביבה, אך תחזוקה מסובכת, עלויות תחזוקה גבוהות, וגורמת נזק גדול לאדמה; אף על פי שהtzfiat אולטרה-סאונד יכולה להפיק את נתוני העיצוב של הרכב כדי להשיג חלוקת דגם פשוטה, רמת הדיוק נמוכה, והתקנת ציוד יכול להיות מסובך מאוד. לכן, זה חשוב במיוחד להריץ חלוקת דגם בצורה פשוטה ומדויקת. דרך צילום מילימטרי הפך לפתרון הטוב ביותר, יתרונותיו ותכונותיו הטכניות הם כדלקמן
- מעל למזג האקלים, ניתן לזהות את מספר דגמי הרכב בסביבה מאורה ללא אור
- דרישות סביבתיות נמוכות, אין פחד מפריטים, גשם, ערפל מים וסיבוכים סביבתיים אחרים, אין צורך להטיל באופן קבוע על חלון ההדרכה, ישנו התדרדרות זקנה נמוכה יותר
- حجم קטן וצריכת אנרגיה נמוכה; נפח קטן יותר וצריכת אנרגיה נמוכה יותר, קל להתקין ולהסתתר בהזדמנויות הנדסיות
- משתמש כדי לספור את מספר כלי הרכב העובר דרך מספר כלי הרכב, וההבחנה בין רכב באמצעות גלי הרדאר היא קלה
- ניתן להשתתף עם אמצעים נוספים כמו מצלמות אור, גיאומגנטיים כמו זיהוי רכב גיאומגנטי וסטטיסטיקת רכב כדי לשפר את אמינות המערכת
- הכרה ובקרת פרטיות, לא סקירת נהגים ואנשים, אלא רק תיעוד וסקירה של מצב הרכב