Glavni sastav sustava:
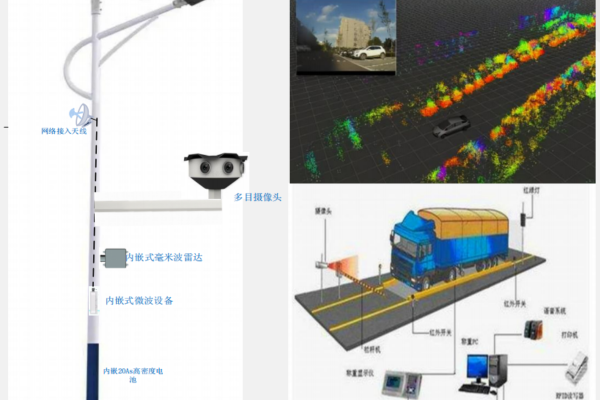
- Višestrukan AI vizualni slikovni sustav, analiza i identifikacija vozila u svjetlu okoline
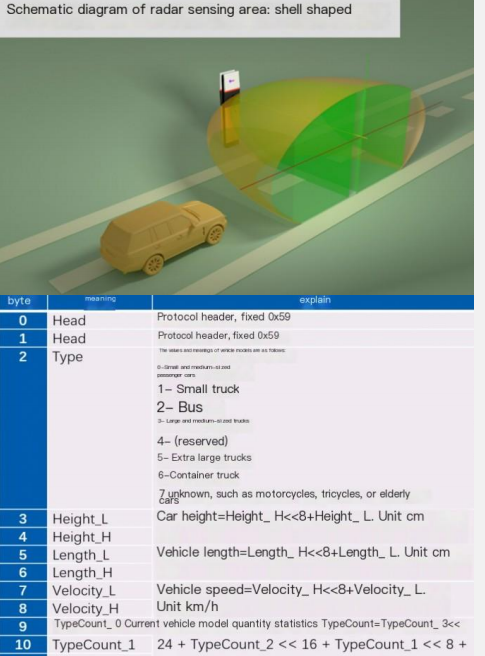
- Milimetarska radar 4D slikovni sustav, prepoznavanje vrste vozila u cijeloj okolini
- Posebna mreža dalekodjelno velikopasivnih podataka mikrotalasni prijenosni sustav, dalekodjelno nadzorno opremu za praćenje podataka
- Sustav snabdivanja električnom energijom, kompleksno komplementarno snabdijevanje električnom energijom, velikokapacitetska niskotemperaturna baterija za čuvanje energije
- Integrirane pametne rasvjetne šipke, mogu se ugraditi Baterije , mikrovalna oprema, radar milimetarskih valova i drugi uređaji za poboljšanje sigurnosti opreme
Pametna šljunka — Ferlike uvjete broja Polida
U trenutku se za prepoznavanje modela obično koriste detekcija video slike, ultrazvukova i indukcijskih spirala. Međutim, detekcija video slike ima više zahtjeva prema kvalitetu i okolini slike, što čini teškoću u postizanju točnog prepoznavanja modela u slučaju da postoje motnje i loše svjetlosti kao što su kiša i snijeg. Jaka, mala utjecaja okoline, ali složeno održavanje, visoke troškove održavanja i uzrokuju veliku štetu tlu; iako može ultrazvučna detekcija izvući podatke o konturu vozila i ostvariti jednostavnu klasifikaciju modela, njezina točnost je niska, a instalacija opreme može biti prilično složena. Stoga je posebno važno jednostavno i točno ostvariti klasifikaciju modela. Putem slikanja milimetarskim valovima postalo je najbolje rješenje, a njegove tehničke značajke i prednosti su sljedeće
- Preko vremena, broj modela vozila može se prepoznati u svjetlu okruženju bez svjetla
- Zahtjevi okoliša su mali, nema straha od prašine, kiše, vodene magle i drugih utjecaja okoliša, nema potrebe redovito čistiti osjetilni prozor, niža je starenja atenuacija
- Mali obim i niska potrošnja energije; manji obim i niža potrošnja energije, lako se montira i sakriva u inženjerskim primjenama
- Koristi se za brojanje broja vozila putem broja vozila, a lako se razlikuje vozilo putem refleksne valove radarom
- Možete surađivati s drugim sredstvima poput svjetlosnih kamera, geomagnetskih poput geomagnetske vožnje i prepoznavanja vozila te statistike vozila kako biste poboljšali pouzdanost sustava
- Osjetljivost i privatnost, ne skeniranje i zapisi vozača i osoba, već samo zapisivanje i skeniranje situacije s vozilima